EB-6 (Explorer Bot 6) is my newest robot (a work in progress). My goal was to build a chat robot with A.I. that could talk with children. By making EB-6 smaller than my other robots, I hope to make him more approachable for children. See Videos on Youtube.
EB-6 Doing Poses




Design
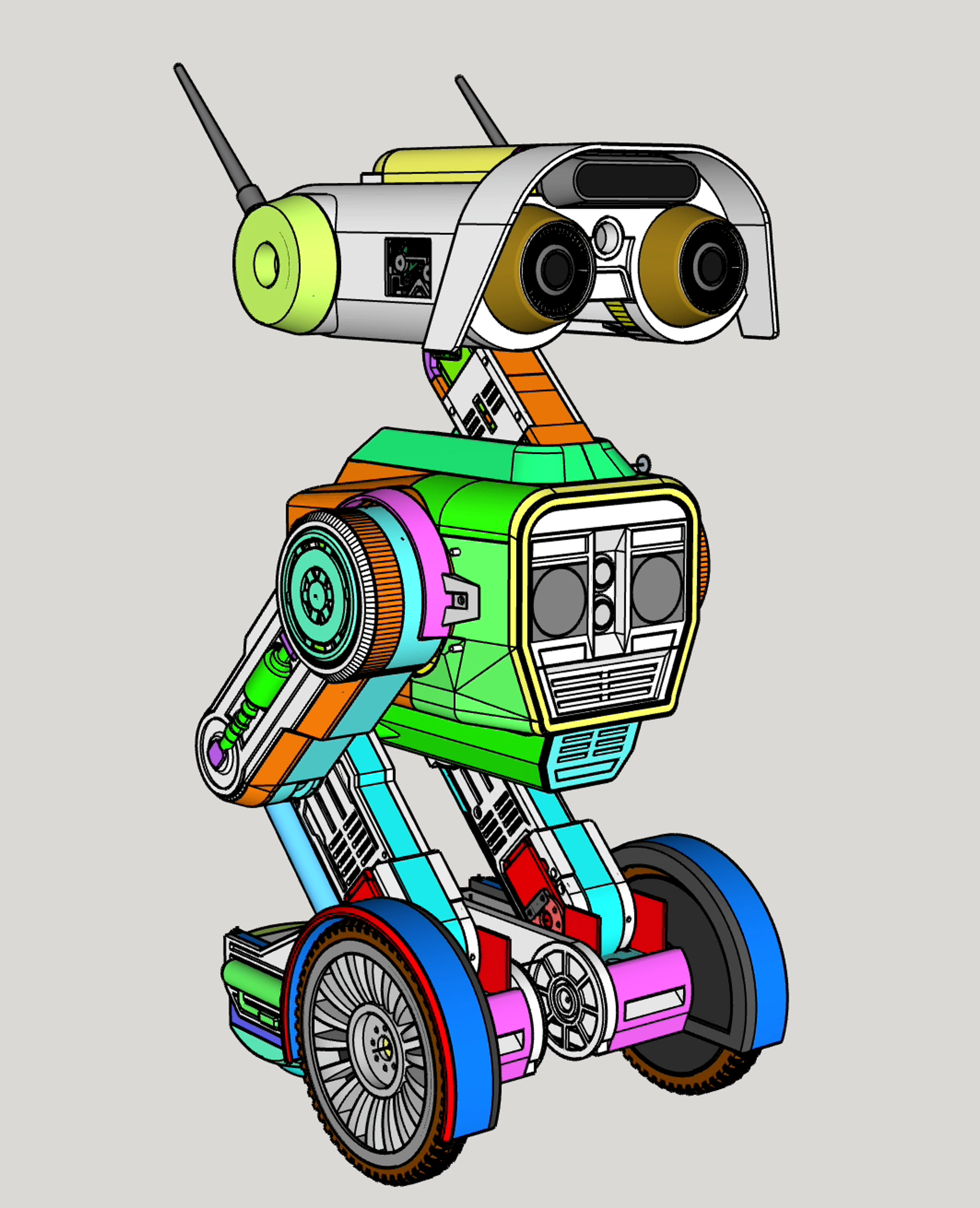
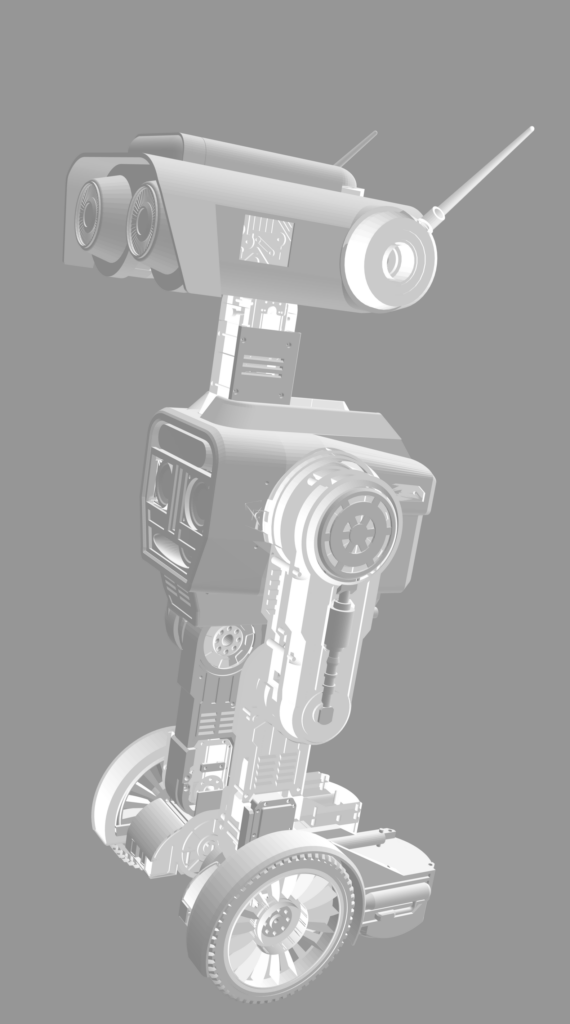
My design for EB-6 was inspired in part by BD-1 from Star Wars Jedi: Fallen Order by EA. But I wanted to do a unique design, with many of the design elements I have used in my other robots (such as the camera eyes), but have EB-6 look like it could fit in with Star Wars droids.
I did all the design using Sketchup (but plan to move to Fusion360), and parts were printed using PLA-Pro on my Taz-6 3D printer. I’ve done several versions of the design, iterating until I was happy with it.
STL Files
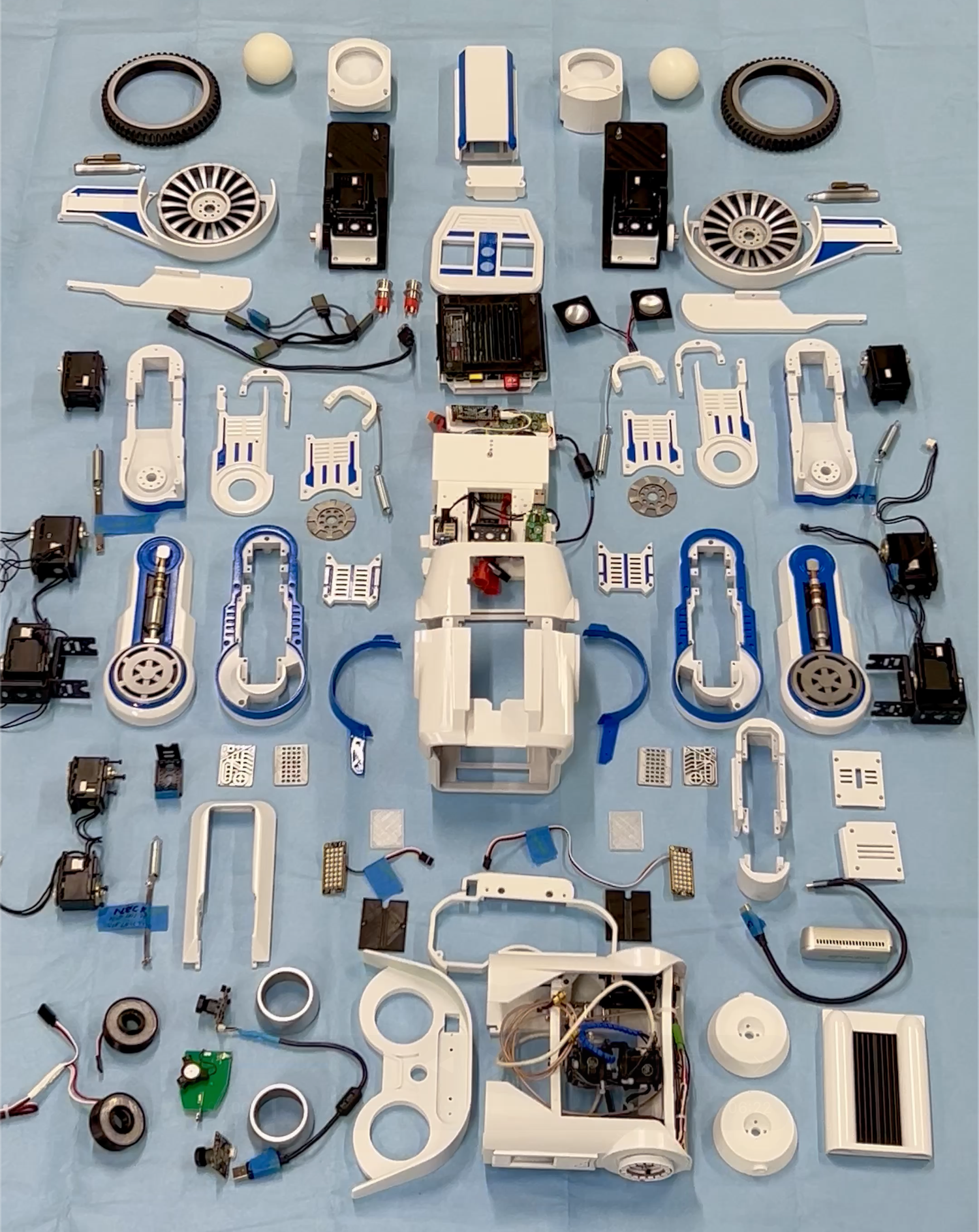
Here are the STL files for all parts. But be forewarned! EB-6 has over 100 3D printed parts!
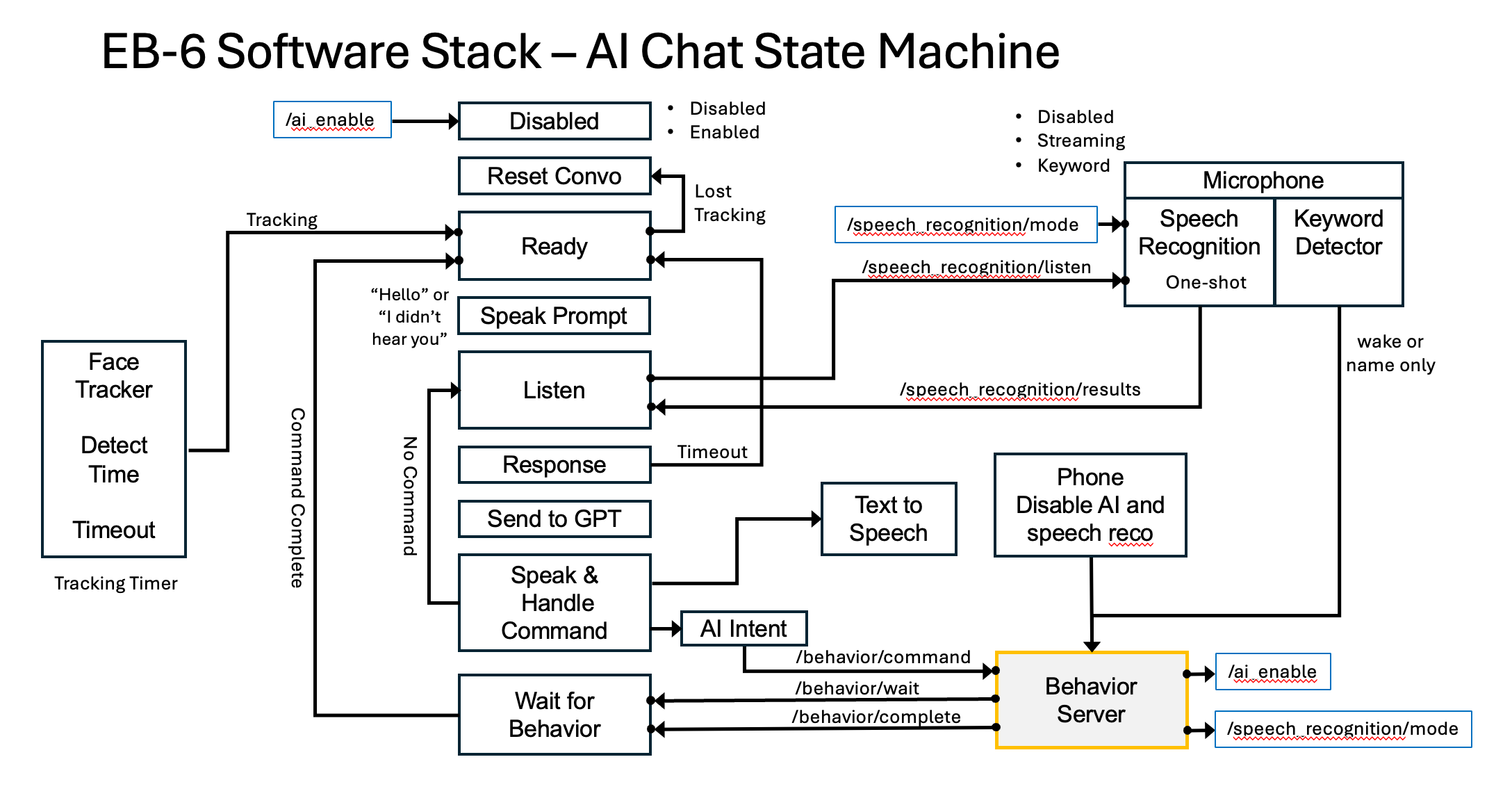
AI
A major goal of this project was to explore the capabilities of emerging AI capabilities. The initial version of EB-6 uses Open AI’s Chat-GPT, but I am also experimenting with Ollama. I was inspired by the excellent Ellee project and have learned a lot from this example.
In addition, there is a “Command and Control” system, utilizing keyword spotting (the robot’s name), to detect specific commands to the robot. I use PicoVoice’s Porcupine wakeword detector for this. In prior robots, I used command and control a lot, I’ve replace most of that with the AI interface, so now I use keyword mainly to wake up the robot from sleep.
Robot Hardware Overview
Sensors:
- Each eye has a wide-angle camera, used for face tracking and identification. (Arducam IMX179 8MP USB camera with 150 degree M12 wide angle lens)
- An Intel RealSense depth camera (D435) is used for object avoidance and person distance measurement.
- Cyber Acoustics CLV-2005 directional USB Microphone
Servos:
- 14 Dynamixel Servos (MX-64 and MX-28)
CPU:
Initial version used a Jetson Nano, but due to significant compute, DRAM, and compatibility issues, I switched to a Gen 8 Intel NUC computer, stripped from its case. Two Arduinos (one in the head, one in the body) are connected to the NUC.
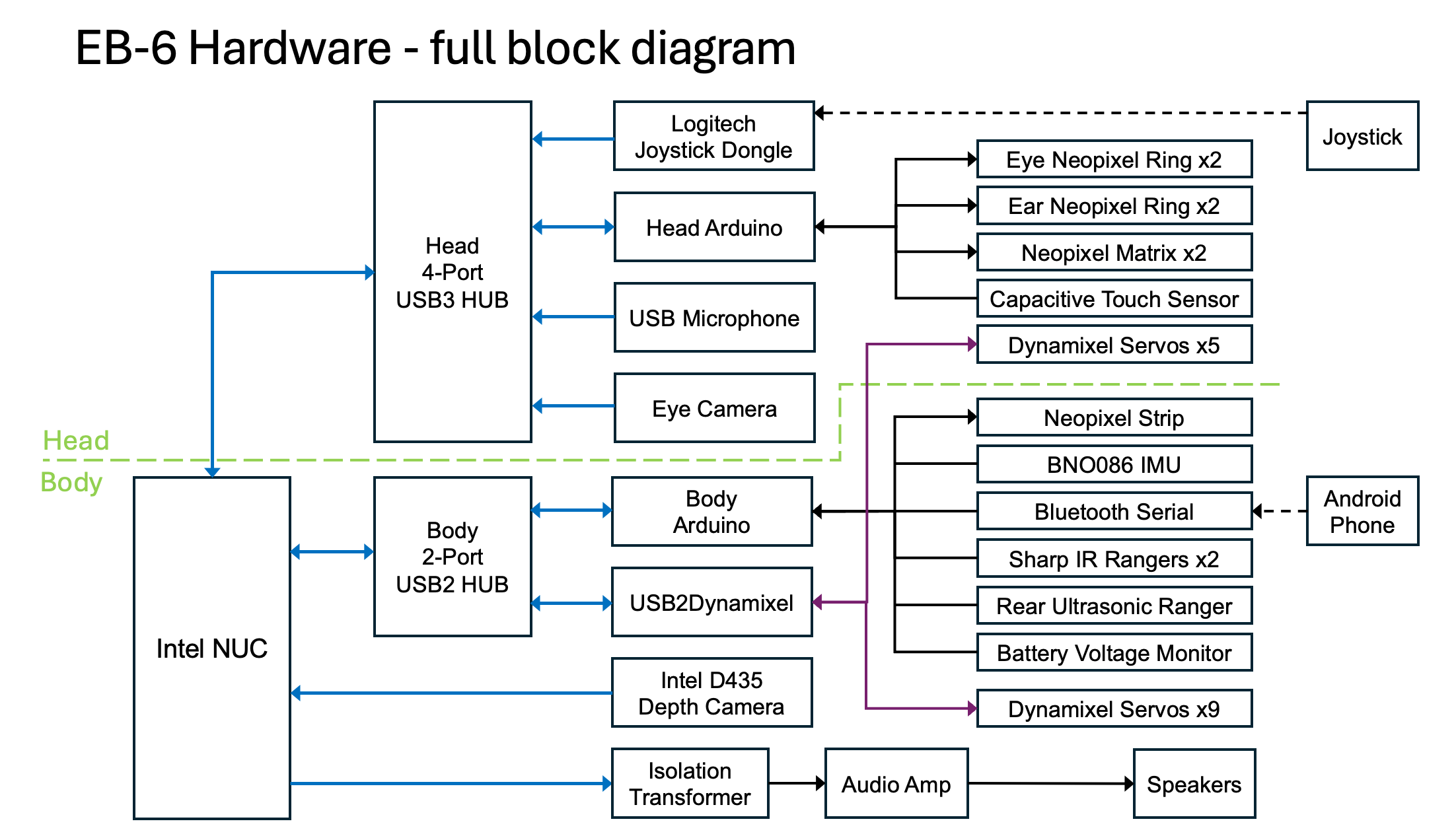
Click for Electronics Overview Presentation
Robot Software
The core software runs on ROS, with a number of custom modules. See below for Software Design Overview presentation and link to GitHub.
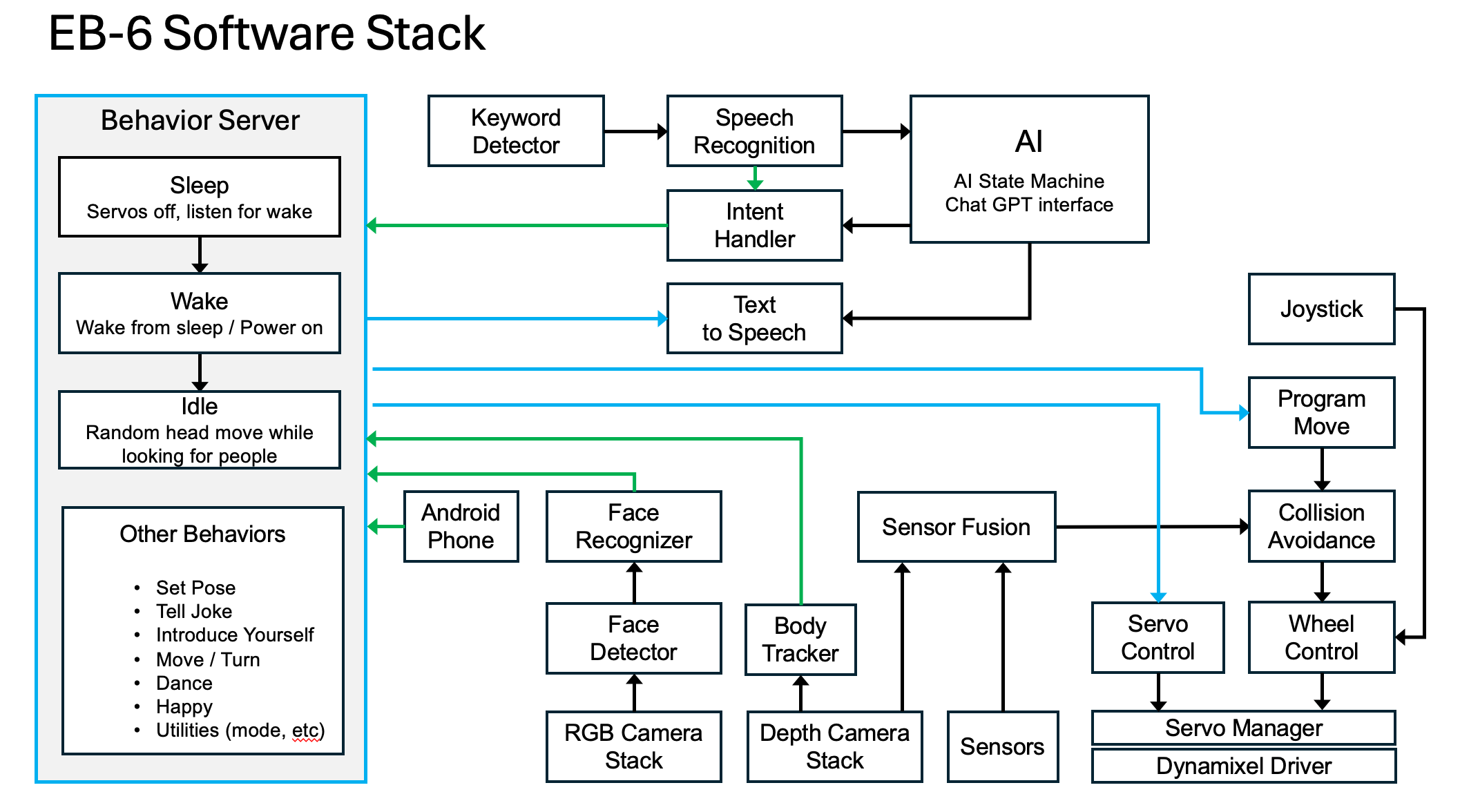
Click for Software Overview Presentation
GitHub Code: https://github.com/shinselrobots/eb6_robot
23 Responses to EB-6