Sheldon Mechanical Hardware Overview
Sheldon is built on a lightweight aluminum frame, which can be disassembled at the “waist” with just 4 thumb screws for easy disassembly and transport.
Lower Body (legs and “feet”)
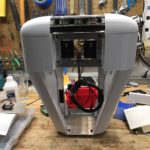
The heaviest components (Batteries, Wheel Motors, Computer) are all contained in the bottom half of the robot, as close to the floor as possible for stability.
Upper Body (torso)
The top of the robot is very lightweight, with the heaviest components being the Shoulder Gearbox and the arms.
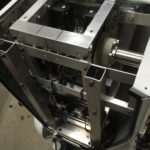
The Shoulder Gearbox is a rigid aluminum frame box. For each arm, there are 2 large servos (Dynamixel MX-106) each with a small gear, together driving a single large gear which gives a 2:1 speed reduction (and therefore 2x torque). Since there are 2 servos, the resulting shoulder motor torque is 4x the torque of a single MX-104.
The body “skin” consists of 3D printed edge / corner pieces, with panels inserted between the edge / corner pieces.
Here are some photos of Sheldon’s hardware components and 3D printed body panels.
-

- Robot Base
-

- Upper Frame attached
-
- Rear closeup of Upper Frame
-

- 2 servo motors driving single shoulder gear
-

- View of gears driving shaft for each arm
-

- Body Edges that attach to Upper Frame
-

- Body edges attached to frame
-

- Body edges
-
- Body edges
-

- Body panels ready to attach to frame
-

- Body panels attached
-

- Head with Realsense camera attached
-

- Head rear view of Arduino and cables
-

- Head sensors
-

- Head top view
-

- Head without helmet
-

- Head with Helmet added
i see it says 14 Dynamixel Servos 64 and 28. How many of each?