Overview
At 4′ 3″ tall (130 cm), Sheldon is my largest robot. He has 17 dynamixel servos, 2 wheel motors, 2 linear actuators (to bend at the waist), multiple 2D and 3D cameras, Laser Range finder, a seven element phased microphone array, and high capacity batteries (60 Amp hours). The main ROS software runs on an Intel NUC computer, with sensor input and motor control via 5 Arduino boards.
Software: Sheldon runs ROS
the “Robot Operating System” (www.ros.org), running on Ubuntu Linux. All source code is available in github at: https://github.com/shinselrobots/sheldon
Hardware Schematics
Hardware Schematics show overall wiring and schematics for each arduino board. Sheldon Schematics rev6
Mechanical: 3D printed “skin” over aluminum frame
Sheldon’s body is 3D printed with “eSun PLA+”. I have a Lulzbot Taz6, which I used for all parts. I use Sketchup for all the CAD design (I don’t necessarily recommend Sketchup for this, it’s just what I know how to use). The plastic body is built over a minimal, lightweight aluminum framework. As I get time, I’ll post more construction pictures and all STL files.
Updates
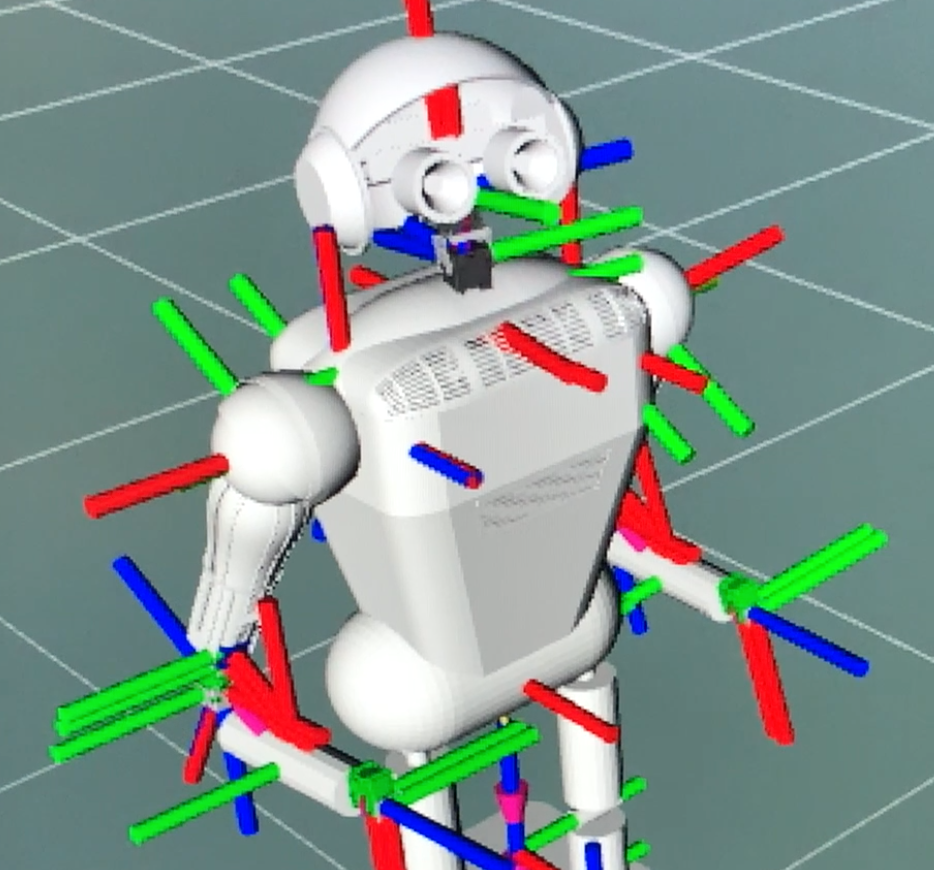
Here is a video of Sheldon modeled in RVIZ, tracking the movements of his real body.
Sheldon featured in Microsoft Surface commercial
In this commercial, Sheldon is shown under various stages of construction. At the time this was filmed, Sheldon had aluminum skin for his body. I have since replaced the aluminum with 3D printed skins.
i see it says 14 Dynamixel Servos 64 and 28. How many of each?